
Ходкость судна
Если плавучестью и остойчивостью обладает любое судно, то другим качеством — ходкостью многие суда могут и не обладать.
Ходкостью называют способность судна двигаться с определенной скоростью при помощи собственных средств.
Для большинства современных судов таким средством является двигатель. Лишь на спортивных и немногих других лодках ходкость обеспечивается мускульной силой членов команды. Баржа не обладает ходкостью, так как не имеет своего двигателя. Поэтому такие суда принято называть несамоходными.
Из двух судов равного веса (или, как говорят, равного водоизмещения) более ходким будет то, которое при одинаковой мощности двигателя имеет лучшую скорость или в случае равной скорости имеет меньшую мощность двигателя. Более ходким будет и то судно, которое при одинаковых с другим судном скорости и мощности двигателя имеет большее водоизмещение.
Ходкость также связана с давлением на судно воды, которая давит не только на днище, но и на борта судна, на его нос и корму. Нетрудно догадаться, что сила давления воды на нос судна направлена в сторону кормы и стремится двигать судно назад. Сила давления воды на корму судна направлена в сторону носа и стремится двигать судно вперед. Обе эти силы, независимо от формы носа и кормы, всегда равны и толкают судно в противоположные стороны, поэтому судно остается на месте. Иное дело, когда судно движется. Хотя вода как жидкость и обладает высокой подвижностью своих частиц — отчего они могут расступаться перед судном, — их движение не протекает совершенно свободно.
Во-первых, частицы эти обладают инерцией, и, чтобы привести их в движение, необходимо известное время.
Во-вторых, вода не является абсолютно жидкой, и ее частицы все же связаны между собой.
Поэтому вода не успевает расступиться перед движущимся судном, и часть ее задерживается, судно как бы гонит ее перед собой. Уровень ее поднимается, нос судна начинает глубже сидеть в воде, и давление воды на него увеличивается.
За кормой по той же причине вода не успевает сразу сомкнуться, отстает от судна. Уровень ее немного опускается, корма слегка выходит из воды, и сила давления на нее воды уменьшается. Теперь сила, действующая на нос судна, становится гораздо большей по величине, чем сила, действующая на корму, а разность их составит силу, направленную против хода судна. Эту силу назвали волновым сопротивлением по его внешнему проявлению: водяной «бугор» перед судном и «впадина» позади судна образуют волны, сопровождающие движущееся судно.
Определив сопротивление воды, можно узнать, какой мощности двигатель надо поставить на судно и какую скорость оно будет иметь. Однако долгое время такие расчеты не удавались. Позже было выяснено, что, кроме сопротивления, вызванного разностью давлений на оконечности, движению судна оказывает сопротивление еще и другая сила. Выяснилось, что вода не только оказывает давление, направленное всегда перпендикулярно поверхности судна, но во время его движения начинает воздействовать и другим образом, причем сила этого воздействия направлена уже параллельно поверхности судна. Этот вид воздействия назвали трением, а силу воздействия — сопротивлением трения.
В действительности сопротивление трения — это совсем другое явление, чем трение твердых тел, хотя также зависит от шероховатости поверхности судна. Особенность сопротивления трения в том, что оно не зависит от давления воды, но зависит от скорости движения, от величины трущихся поверхностей, а также и от температуры воды.
Итак, полное сопротивление воды состоит из волнового сопротивления, которое удерживает судно за носовую часть и за корму, и сопротивления трения, которое держит судно главным образом за днище и погруженную часть бортов.
Волновое сопротивление уменьшают тем, что судну придают более выгодную, обтекаемую форму, заостряют нос и корму (чем уменьшают «бугор» и «впадину») и увеличивают длину за счет ширины, пока это допускает остойчивость.
Сопротивление трения уменьшают, удаляя выступы и шероховатости с поверхности судна. Хорошо было бы также уменьшить поверхность подводной части, не уменьшая ее объема, но сделать это уже гораздо труднее.
И все-таки полностью уничтожить силу сопротивления воды невозможно. Поэтому, чтобы судно двигалось, на него должна действовать дополнительная сила, преодолевающая силу сопротивления воды. И такая сила нашлась. Это опять-таки давление воды!
Мы уже убедились, что давление воды зависит не только от глубины погружения, но и от нас: двигая судно, мы увеличиваем давление перед судном и уменьшаем за кормой; заострив нос и корму, можно снова изменить это давление. Итак, оно зависит не только от глубины, а также и от скорости движения предмета в воде и от его формы. Следовательно, им можно управлять.
Сделав часть судна способной двигаться (проще всего, вращаться) даже в том случае, когда само судно неподвижно, и придав этой части наиболее подходящую форму, можно добиться того, что вода будет оказывать на эту подвижную часть судна такое давление, сила которого преодолеет силу сопротивления воды. Такую подвижную часть имеет каждое самоходное судно, и называется она движителем.
Наиболее распространенным и удобным движителем является гребной винт, но существуют и многие другие виды движителей: гребные колеса, весла, крыльчатые движители и т. д. Движителем, но совсем другого рода, являются также паруса.
Конечно, гребной винт сам по себе вращаться не будет. Для этого на судне и существуют двигатели различных типов.
Что такое ходкость судна
Мореходные и эксплуатационные качества судов
Способность судна двигаться в окружающей среде с заданной скоростью при определенной мощности главных двигателей и соответствующем движителе называется ходкостью. Судно движется на границе двух сред — воды и воздуха. Поскольку плотность воды примерно в 800 раз больше плотности воздуха, то и сопротивление воды значительно больше воздушного сопротивления.
Сила сопротивления воды состоит из сопротивления трения, сопротивления формы, волнового сопротивления и сопротивления выступающих частей.
Вследствие вязкости воды между корпусом судна и ближайшими к корпусу слоями воды возникают силы трения, на преодоление которых затрачивается часть мощности главного двигателя. Равнодействующая этих сил называется сопротивлением трения RT. Сопротивление трения зависит также от скорости, от смоченной поверхности корпуса судна и от степени шероховатости. На величину шероховатости влияет качество окраски, а также обрастание подводной части корпуса морскими организмами. Чтобы сопротивление трения по этой причине не увеличилось, судно подвергают периодическому докованию и очистке подводной части. Сопротивление трения определяют расчетным путем.
Воздушное сопротивление RВОЗД движению судна можно найти путем продувки надводной части модели в аэродинамической трубе.
Таким образом, полное сопротивление движению судна определяется как сумма отдельных составляющих
где R — полное сопротивление, Н или кГс; v — скорость судна м/с.
Мощность на фланце главного двигателя больше буксировочной, так как при ее определении необходимо учитывать пропульсивный коэффициент η (η=ηPηK, где ηP — коэффициент полезного действия движителя, а ηK — коэффициент влияния корпуса), КПД редуктора ηРЕД, КПД валопровода ηВ (опорных и упорных подшипников) или других специальных передач:
Следует отметить, что скорость судна на волнении уменьшается. Поэтому на некоторых судах мощность двигателя увеличивают с целью получения заданной скорости на определенном волнении
Ходкость и движители
Основные понятия и определения
Xодкостью называется способность судна развивать заданную скорость под действием приложенной к нему движущей силы.
Учение о ходкости судна принято делить на две части – сопротивление окружающей среды (воды, воздуха) движению судна и судовые движители.
Первая часть посвящена выявлению физической сущности возникновения сил сопротивления среды движению судна и изучению законов, отражающих изменение этих сил, а так же определению количественной зависимости между формой обводов корпуса, силами сопротивления, скоростью судна и необходимой мощностью энергетической установки.
Во второй части изучаются типы движителей, принципы их выбора и методы расчета. Конечной целью исследования является выбор такого сочетания элементов движителя, при которых для достижения заданной скорости судна затрачивается минимальная мощность судовой энергетической установки.
Силы, действующие на судно при его движении
При движении с некоторой скоростью V судно испытывает силу сопротивления окружающей среды R (воды и воздуха), направленную в сторону, противоположную его движению.
Гидродинамические силы, приложенные к элементам поверхности корпуса движущегося судна, можно разложить на две составляющие: касательную и нормальную. Касательную составляющую называют силой трения, а нормальную – силой давления. На рисунке сила трения τ и сила давления Р действуют на выделенный элемент смоченной поверхности судна.
 Рис. 1
Рис. 1
Проецируя все элементарные силы трения на направление скорости движения судна и суммируя их по всей смоченной поверхности, получим результирующую сил Определение результирующих сил инерции многоцилиндрового двигателя трения – сопротивление трения RТР, обусловленное действием сил вязкости.
Результирующая проекции сил давления на направление скорости движения судна V, взятая по всей смоченной поверхности, определяет сопротивление давления RД, которое обуславливается плотностью и вязкостью воды.
Давления по поверхности судна распределяются неравномерно: в носовой части они больше, в кормовой – меньше. Такой перепад давлений образует сопротивление давления, которое в свою очередь разделяют на две части. Первая часть – сопротивление формы RФ, вызванная влиянием вязкости жидкости, вторая – волновое сопротивление RВ зависит от интенсивности волновых движений жидкости, вызванных движущимся судном.
Каждое судно имеет те или иные выступающие части (рули, кронштейны и выкружки гребных валов, скуловые кили и т. п.). Сопротивление воды, вызываемое ими, называют сопротивлением выступающих частей RВЧ. Кроме того, судно испытывает воздушное сопротивление RВОЗ, распределенное по надводной поверхности движущегося судна.
Таким образом, полное сопротивление движению судна суммируется из следующих составляющих:
R = R Т Р + R В + R Ф + R В Ч + R В О З ( 1 )
В практических расчетах полное сопротивление движению судна вычисляется по формуле:
По аналогии с формулой (1) коэффициент полного сопротивления может быть представлен в виде суммы коэффициентов:
С = С Т Р + С В + С Ф + С В Ч + С В О З и л и С = С Т Р + С О + С В Ч + С В О З
Следовательно, полное сопротивление судна равно:
R = ( C T P + C O + C В Ч + С В О З ) · ρ π V 2 2 · ( S + S В Ч ) ( 3 )
Основные составляющие полного сопротивления движению судна
Сопротивление трения. В результате опытов было установлено, что при обтекании тела (судна) потоком жидкости вблизи его поверхности образуется тонкий слой жидкости, называемый пограничным слоем. В пределах этого слоя скорости частиц жидкости изменяются от нуля на поверхности тела (частицы прилипают к поверхности) до значений скорости набегающего потока на внешней границе пограничного слоя. Изменение скоростей в этом слое обусловлено интенсивным проявлением сил вязкости.
Движение частиц жидкости внутри пограничного слоя может быть ламинарным или турбулентным. Режим движения жидкости внутри пограничного слоя определяется числом Рейнольдса R:
При значительно небольших значениях Re (при Re Сухогруз Amorita
Источник: fleetphoto.ru
При так называемом критическом числе Re крит. = 5 · 10 5 происходит переход ламинарного пограничного слоя в турбулентный. Турбулентный режим характеризуется тем, что частицы потока, двигаясь по главному направлению – вдоль тела, совершают дополнительное движение – поперек пограничного слоя. В этом случае происходит перенос жидкости из одного слоя в другой, который приводит к интенсивному перемешиванию масс жидкости и, как следствие, выравниванию скоростей потока в пределах слоя, что вызывает соответствующее увеличение сил трения. Таким образом, при турбулентном режиме обтекания силы трения значительно больше, чем при ламинарном.
Турбулентный режим обтекания поверхности корпуса судна возникает из-за шероховатости этой поверхности. Судовая поверхность не является технически гладкой, а имеет значительную шероховатость различного происхождения, влияние которой на сопротивление трения судна необходимо учитывать. В целом шероховатость обусловлена:
Обрастание подводной поверхности судна очень сильно увеличивает шероховатость и тем самым уменьшает скорость судна. Интенсивность обрастания зависит от многих факторов: температуры воды, ее солености, времени года, района плавания, соотношения количества ходовых и стояночных дней, скорости судна, состояния обшивки и т. п. В отдельных случаях уже через год после докования при плавании в средних широтах потеря скорости составляет 10 – 15 %.
Наиболее эффективным средством борьбы с обрастанием является периодическое докование судна с обязательной очисткой подводной части корпуса и покрытием его противообрастающими красками. Зачистка подводной части корпуса судна может производиться и без докования судна на воде водолазами. Обрастание судна в этом случае начнется значительно быстрее, так как корпус не был вскрыт соответствующими красками.
Сопротивление формы. У плохо обтекаемых корпусов потери энергии потока из-за действия сил вязкости настолько велики, что частицы жидкости вблизи корпуса, не доходя до ахтерштевня, теряют скорость, а под действием возрастающего давления могут начать двигаться против набегающего потока.
Рис. 2
Возникающий встречный поток жидкости оттесняет пограничный слой от поверхности судна, приводит к срыву потока и образованию вихрей. Точка А, в которой начинается оттеснение пограничного слоя, называется точкой отрыва пограничного слоя.
Интенсивное вихреобразование в кормовой части судна еще в большей степени снижает давление в этом районе и увеличивает разность результирующих давлений, действующих на носовую и кормовую оконечности, т. е. приводит к росту сопротивления формы.
Волновое сопротивление. Распределение гидродинамических давлений вдоль корпуса движущегося судна неравномерно и характеризуется повышением в оконечностях и понижением в районе миделя. Вследствие этого форма поверхности воды искажается: там, где давление в потоке выше атмосферного, образуется бугор, а где оно ниже атмосферного – образуется впадина. Выведенные из положения равновесия частицы жидкости под действием сил тяжести и сил инерции стремятся вернуться в свое первоначальное положение. Это приводит к возникновению колебательного движения воды, внешним проявлением которого являются так называемые корабельные волны, образующиеся на спокойной поверхности воды.
Установлено, что корабельные волны имеют два очага возникновения: у форштевня развивается носовая система волн, у ахтерштевня – кормовая. В каждой из них можно выделить расходящиеся и поперечные волны. На создание этой волновой системы судном затрачивается энергия и происходит потеря скорости, что и принято называть волновым сопротивлением.
Сухогруз Amadore
Источник: fleetphoto.ru
Воздушное сопротивление. Сопротивление воздуха RВОЗ движению судна слагается из сопротивления надводной части корпуса, надстроек, рубок и других палубных сооружении. Основную часть сопротивления (до 60 – 80 %) создают надстройки, которые по своей конфигурации приближаются к плохо обтекаемым телам.
Назначение судовых движителей, гребной винт, шаг винта и ВРШ
Судовымидвижителями называются специальные устройства, которые преобразуют энергию главных двигателей в движущую силу (полезную тягу), необходимую для преодоления сопротивления среды движению судна и обеспечения заданной скорости его движения.
По принципу действия судовые движители являются гидрореактивными, т. к. они создают движущую силу за счет реакции масс воды, отбрасываемых рабочими деталями движителя – лопастями – в сторону, противоположную движению судна.
В настоящее время на водном транспорте применяются следующие основные типы судовых движителей: гребной винт, гребное колесо, крыльчатый и водометный движители.
Различают три основных конструктивных типа гребных винтов: цельные винты (цельнолитые), винты со съемными лопастями (сборные) и винты с поворотными лопастями – винты регулируемого шага (ВРШ Влияние гребного винта регулируемого шага (ВРШ) и руля на управляемость судна ).
Сухогруз Lehmann Belt
Источник: fleetphoto.ru
Гребной винт характеризует его шаг. Шагом винта называется расстояние, на которое переместится точка винта за один полный оборот винта при вращении его в абсолютно твердом теле. Гребные винты, в зависимости от того, в какую сторону они вращаются, бывают левого и правого шага. В отличие от лопастей ВФШ у винтов регулируемого шага (В Р Ш) лопасти могут поворачиваться вокруг своей продольной оси и изменять шаг, что обеспечивает возможность использования полной мощности двигателя при оптимальной частоте вращения на любом режиме движения судна.
Расчет гребного винта заключается в определении его геометрических характеристик (диаметра, шага, дискового отношения и числа лопастей), обеспечивающих наиболее высокие пропульсивные качества судну в основном режиме его эксплуатации. Так, транспортному судну указанные характеристики должны обеспечить наивысшую скорость, буксирному – наибольшую тягу на гаке при полном использовании мощности главных двигателей.
Преимущества и недостатки ВРШ по сравнению с обычным винтом: возможность изменять положение лопастей у ВРШ позволяет изменять силу упора винта не меняя частоты и направления вращения вала с полного переднего хода до нуля, а затем до полного заднего хода. Это позволяет использовать на судне нереверсивный двигатель, который проще в обслуживании и моторесурс которого значительно выше реверсивного. За счет того, что нет необходимости выполнять реверс для изменения силы упора винта, а достаточно только развернуть лопасти винта, что делается дистанционно с мостика, время перехода судна от одного режима движения к другому значительно сокращается. Это улучшает маневренные качества судна, упрощает эксплуатацию двигателя. Но ВРШ значительно сложнее по конструкции, что уменьшает его надежность и увеличивает стоимость. ВРШ имеют при том же КПД больший вес и размеры, чем обычные винты, что усложняет их крепление.
Нашли опечатку? Выделите и нажмите CTRL+Enter
ТЕМА 2.5. ХОДКОСТЬ СУДНА И ЕГО ДВИЖИТЕЛИ.
ХОДКОСТЬ.
Способность судна двигаться в окружающей среде с заданной скоростью при определенной мощности главных двигателей и соответствующем движителе называется ходкостью. Судно движется на границе двух сред — воды и воздуха. Поскольку плотность воды примерно в 800 раз больше плотности воздуха, то и сопротивление воды значительно больше воздушного сопротивления.
Сила сопротивления воды состоит из сопротивления трения, сопротивления формы, волнового сопротивления и сопротивления выступающих частей.
Вследствие вязкости воды между корпусом судна и ближайшими к корпусу слоями воды возникают силы трения, на преодоление которых затрачивается часть мощности главного двигателя. Равнодействующая этих сил называется сопротивлением трения RT. Сопротивление трения зависит также от скорости, от смоченной поверхности корпуса судна и от степени шероховатости. На величину шероховатости влияет качество окраски, а также обрастание подводной части корпуса морскими организмами. Чтобы сопротивление трения по этой причине не увеличилось, судно подвергают периодическому докованию и очистке подводной части. Сопротивление трения определяют расчетным путем.
При обтекании корпуса судна вязкой жидкостью происходит перераспределение гидродинамических давлений по его длине. Равнодействующая этих давлений, направленная против движения судна, называется сопротивлением формы RФ. Сопротивление формы зависит от скорости судна и от его формы. При плохо обтекаемой форме в кормовой части судна образуются вихри, что приводит к понижению давления в этом районе и увеличению сопротивления формы судна.
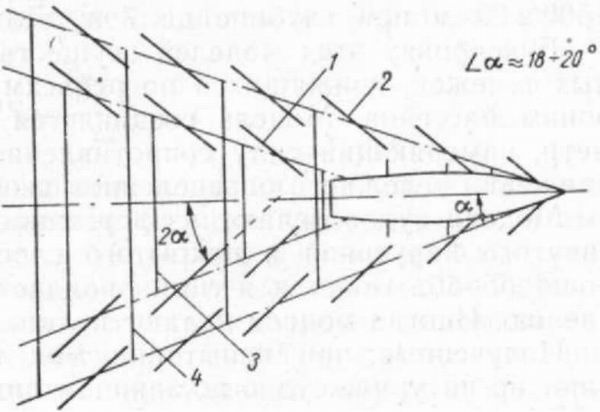 |
Рис. 171. Система волн, возникающих при движении судна. 1, 2 — расходящиеся кормовые и носовые соответственно; 3, 4 — поперечные носовые и кормовые соответственно.
Волновое сопротивление RВ возникает из-за образования волн в зонах повышенного и пониженного давления при движении судна. На волнообразование также расходуется часть энергии главного двигателя. Волновое сопротивление зависит от скорости судна, формы его корпуса, а также от глубины и ширины фарватера.
Сопротивление выступающих частей RВЧ зависит от сопротивления трения и от формы выступающих частей (рулей, скуловых килей, кронштейнов гребных валов и пр.). Сопротивление формы и волновое объединяются в остаточное сопротивление, которое можно рассчитать только приближенно. Для точного определения величины остаточного сопротивления проводят испытания моделей судов в опытовом бассейне.
Воздушное сопротивление RВОЗД движению судна можно найти путем продувки надводной части модели в аэродинамической трубе.
Таким образом, полное сопротивление движению судна определяется как сумма отдельных составляющих
Это сопротивление называют буксировочным, так как оно равно усилию в тросе, возникающему при буксировке судна.
Мощность, необходимая для буксировки судна со скоростью v, называется буксировочной мощностью (кВт или л. с):
EPS = Rv / 102 или EPS = Rv / 75,
где R — полное сопротивление, Н или кГс; v — скорость судна м/с.
Мощность на фланце главного двигателя больше буксировочной, так как при ее определении необходимо учитывать пропульсивный коэффициент η (η=ηPηK, где ηP — коэффициент полезного действия движителя, а ηK — коэффициент влияния корпуса), КПД редуктора ηРЕД, КПД валопровода ηВ (опорных и упорных подшипников) или других специальных передач:
Следует отметить, что скорость судна на волнении уменьшается. Поэтому на некоторых судах мощность двигателя увеличивают с целью получения заданной скорости на определенном волнении.
СУДОВЫЕ ДВИЖИТЕЛИ.

Рис. 172. Четырехлопастной гребной винт фиксированного шага.
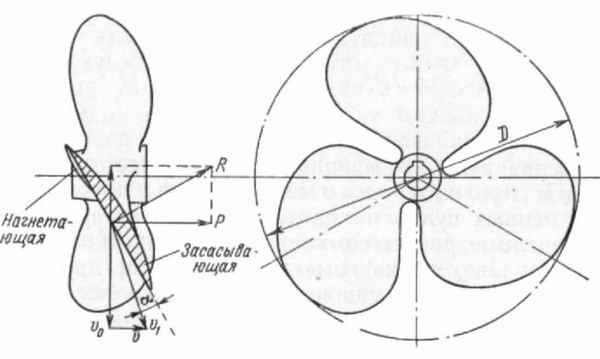 Рис. 173. Гребной винт фиксированного шага (ВФШ) и схема создания упорного давления элементарной площадкой лопасти винта.
Рис. 173. Гребной винт фиксированного шага (ВФШ) и схема создания упорного давления элементарной площадкой лопасти винта.
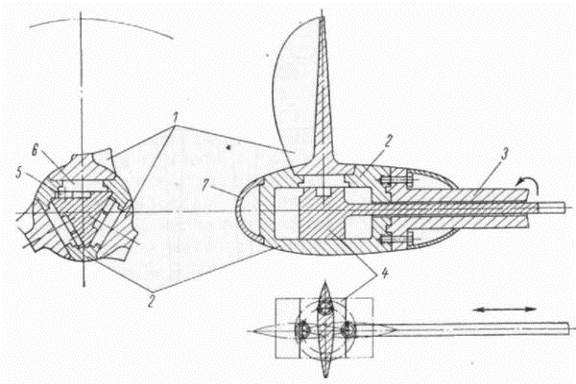 Рис. 174. Гребной винт регулируемого шага (ВРШ) с поворотношатунным механизмом изменения шага. 1 — лопасти винта; 2— ступица; 3— гребной вал; 4 — ползун со штангой; 5 — палец шатуна; 6 —подшипник лопастной заделки; 7 — обтекатель винта.
Рис. 174. Гребной винт регулируемого шага (ВРШ) с поворотношатунным механизмом изменения шага. 1 — лопасти винта; 2— ступица; 3— гребной вал; 4 — ползун со штангой; 5 — палец шатуна; 6 —подшипник лопастной заделки; 7 — обтекатель винта.
Гребной винт регулируемого шага (ВРШ) имеет конструкцию, обеспечивающую поворот лопастей в ступице во время работы винта на ходу судна из поста управления, расположенного в рубке. При повороте лопастей, осуществляемом механизмом по многообразным кинематическим схемам (одна из которых—поворотно-шатунная—приведена на рис. 174), изменяется шаг винта, отчего изменяется и величина создаваемого им упора, увеличивающего или уменьшающего скорость хода, и направление движения судна, при этом число оборотов, мощность главной машины и направление ее вращения остаются неизменными. Использование винтов регулируемого шага допускает применение на судах нереверсивных главных машин с упрощенной системой обслуживания, что сокращает износ их цилиндров примерно на 30—40% (возникающий у реверсивных машин от частого изменения режима работы и направления вращения), позволяет полнее использовать мощность машин и поддерживать высокое значение к. п. д. винта. Суда с ВРШ обладают гораздо более высокими маневренными качествами, чем суда с ВФШ.
Винт регулируемого шага (ВРШ) — это гребной винт, у которого регулируется угол разворота лопастей. Лопасти такого винта разворачиваются специальным механизмом в любое положение в диапазоне «полный вперед — стоп—полный назад», т. е. в зависимости от степени разворота лопастей, не изменяя работы главного двигателя, судну можно придать или движение вперед, или остановиться на месте, или создать движение назад.
При эксплуатации всех видов ВРШ применяется принципиально одинаковая система управления. Гидравлическая система управления ВРШ дает возможность широко использовать в качестве главного двигателя нереверсивные силовые установки (турбины, дизели большой мощности и т. д.).
Внедрение ВРШ на судах позволяет улучшить маневренные качества судов. К ним в первую очередь относится уменьшение тормозного пути (за счет быстрого перевода лопастей винта на режим работы заднего хода) и периода торможения. Гашение инерции начинается почти немедленно после дачи команды «Полный назад» (отдельные суда с полного хода останавливаются за 1 мин при тормозном пути 1—1,5 корпуса). На судах с ВРШ облегчается выполнение многих видов маневров при съемке с якоря и постановке на якорь, при швартовке судна к причалу и лагом к другому судну, при расхождении судов для предотвращения столкновений и т. д.
Суда с ВРШ обладают гораздо более высокими маневренными качествами, чем суда с ВФШ.
Крыльчатый движитель (рис. 175) представляет собою конструктивное устройство, состоящее из горизонтально вращающегося цилиндра с вертикально расположенными на нем 6—8 лопастями мечевидной, обтекаемой формы, поворачивающимися вокруг своих осей маятниковым рычагом, управляемым из рулевой рубки.
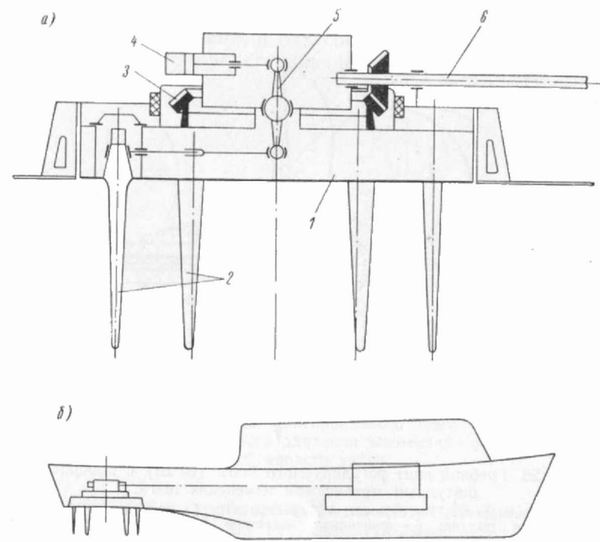 |
Рис. 175. Крыльчатый движитель: а — конструктивная схема; б — размещение движителя на судне. 1 — несущий диск; 2 — поворотные лопасти; 3 — ведомая шестерня, приводящая во вращение диск; 4 — гидравлическое устройство управления маятниковым рычагом; 5 — маятниковый рычаг, изменяющий положение лопастей вокруг своей оси; 6 — гребной вал с ведущей конической шестерней.
При вращении диска на лопастях, как на крыле, возникает подъемная сила, составляющая которой создает упорное давление. При повороте лопастей изменяется величина упора и его направление, что дает возможность варьировать направление движения судна без помощи руля (на судне с этим движителем руль не устанавливается), а также величину упора движителя от «Полного вперед» до «Полного назад» или останавливать судно, не изменяя скорости и направления вращения (без реверса) главной силовой установки. К. п. д. крыльчатого движителя почти равен к. п. д. гребного винта, но крыльчатый движитель значительно сложнее по конструкции. Выступающие лопасти часто ломаются. Однако в последнее время этот движитель находит все более широкое применение, обеспечивая судам хорошую маневренность, позволяющую им свободно работать в узкостях.
Водометный движитель относится к серии водопроточных движителей. Современные водометные движители делают трех типов: с выбросом водяной струи в воду, в атмосферу и с полуподводным выбросом. Гребной винт работает как насос, засасывающий воду в канал через трубу, проходящую в днище корпуса впереди винта. Для защиты от попадания на винт посторонних предметов в начале канала укрепляется защитная решетка. Для уменьшения потерь от закручивания гребным винтом водного потока и повышения к. п. д. движителя за винтом устанавливается контрпропеллер. Направление хода судна изменяется перекладкой реверс-руля. Коэффициент полезного действия такого движителя составляет только 35—45%, а отсутствие всяких выступающих частей в подводной части судна обеспечивает ему большую проходимость на мелководье, в узкостях и на засоренных фарватерах. Для судна с таким движителем не являются препятствием даже плавающие предметы, через которые оно свободно переходит. Перечисленные преимущества водометного движителя сделали его применение особенно удобным на речных судах, в первую очередь на лесосплаве. В последние годы водометные движители стали применяться и на быстроходных судах, таких, как суда на подводных крыльях, развивающие скорость хода до 95 км/час. Использование современных паровых и газовых турбин позволяет успешно применить водометные движители на крупных морских судах, где по расчетам пропульсивный к. п. д. может достичь около 83%, что на 11% выше пропульсивного коэффициента гребного винта, запроектированного для того же судна. К недостаткам судов с этим движителем следует отнести потери судном грузоподъемности на величину веса прокачиваемой воды и потери объема внутренних помещений, занимаемого каналом.
Вопросы и задания для самоконтроля:
Что вы понимаете под судовыми движителями?
Что называется шагом винта?
Что называется х о д к о с т ь ю?
Что называется с и л о й д а в л е н и я?.
Что определяет с о п р о т и в л е н и е д а в л е н и я?
Что называется с о п р о т и в л е н и е ф о р м ы?
Что называется в о л н о в о е с о п р о т и в л е н и е?
Что называется сопротивлением выступающих частей?
Что означает в о з д у ш н о е с о п р о т и в л е н и е?
Что означает о с т а т о ч н о е с о п р о т и в л е н и е?
Что означает т у р б у л е н т н ы й р е ж и м?